
Page 116 - 《橡塑技术与装备》2023年11期
P. 116
橡塑技术与装备 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
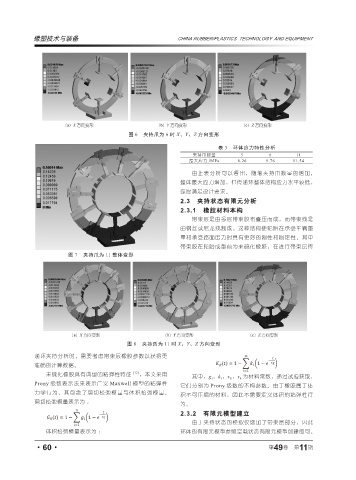
图 6 夹持爪为 6 时 X、Y、Z 方向变形
表 3 环体应力特性分析
夹持爪数量 5 6 11
最大应力 /MPa 8.26 9.76 11.54
, ,
由上表分析可以看出,随着夹持爪数量的增加,
整体最大应力增加,但传递环整体结构应力水平较低,
强度满足设计要求。
2.3 夹持状态有限元分析
2.3.1 橡胶材料本构
带束层是由多层带束胶布叠压而成,而带束线是
由钢丝或尼龙线制成。这种结构使轮胎在承受车辆重
0
量和承受路面压力时具有更好的刚性和稳定性。其中
∗
, ,
带束胶在轮胎成型前为未硫化橡胶,在进行带束层传
∗
图 7 夹持爪为 11 整体变形
1 1
2 2
0
2 2
0 0
0
∗
0
∗
1 1
图 8 夹持爪为 11 时 X、Y、Z 方向变形
1
递环夹持分析时,需要考虑带束层橡胶参数以获得更
准确的计算数据。 1 1
1 1 [12] 1
未硫化橡胶具有典型的粘弹性特征 ,本文采用
2
2
2 2 0 其中,g i ,k i ,τ G ,τ k 为材料常数,通过试验获取,
Prony 级数表示法来表示广义 Maxwell 模型的粘弹性 它们分别为 Prony 级数的本构参数。由于橡胶属于体
0
0
力学行为,其包含了剪切松弛模量与体积松弛模量。
0 积不可压缩的材料,因此不需要定义体积的粘弹性行
剪切松弛模量表示为 :
为。
2.3.2 有限元模型建立
1 1
由于夹持状态的模拟仅增加了带束层部分,因此
1
体积松弛模量表示为 : 环体的有限元模型参照空载状态有限元模型创建即可。
1 1
·60· 1 第 49 卷 第 11 期