
Page 114 - 《橡塑技术与装备》2023年11期
P. 114
,
0 , , ,
0 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
橡塑技术与装备 ∗
∗
∗
除变形势能与外力做功外,由接触引起的能量增 零部件材料定义、接触关系设定、网格划分、施加载荷、
∗
加应考虑进势能泛函中,其形式相当于在接触面两节 设定约束及求解 [6] 。
点间施加弹簧,其中 (x+g o ) 为弹簧变形量,罚函数为 2.2.1 有限元模型建立
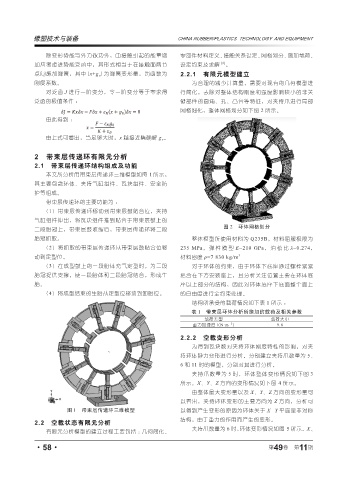
刚度系数。 为合理的减少计算量,需要对现有的几何模型进
对泛函 J 进行一阶变分,令一阶变分等于零求得 行简化,去除对整体结构刚度和强度影响较小的非关
1 1
泛函的极值条件 : 2 1 0 1 2 键部件的圆角、孔、凸台等特征,对夹持爪进行局部
2 2 2 2
2 2 0 网格细化,整体网格划分如下图 2 所示。
0
0 0
由此得到 : 0
0
0
由上式可看出,当足够大时,x 越接近精确解 g o 。
1 1
1 1
1
2 带束层传递环有限元分析
1
2.1 带束层传递环结构组成及功能
1
1
1 1
本文所分析用带束层传递环三维模型如图 1 所示,
1
1
其主要包含环体、夹持气缸组件、瓦块组件、安全防
护等组成。
带束层传递环的主要功能为 :
(1)带束层传递环移动到带束层鼓贴合位,夹持
气缸组件伸出,将瓦块组件推到贴合于带束层鼓上的
图 2 环体网格划分
二段胎冠上,带束层鼓收缩后,带束层传递环将二段
胎冠抓取。 整体模型所使用材料为 Q235B,材料屈服极限为
(2)将抓取的带束层传递环从带束层鼓贴合位移 235 MPa,弹性模型 E=210 GPa,泊松比 λ=0.274,
动到定型位。 材料密度 ρ=7 830 kg/m 3
(3)在成型鼓上的一段胎体充气定型时,为二段 对于环体的约束,由于环体下底座通过螺栓紧紧
胎冠提供支撑,使一段胎体和二段胎冠结合,形成生 把合在下方安装座上,且分析关注位置主要在环体底
胎。 座以上部分的结构,因此对环体底座下底面整个面上
(4)将成型结束的生胎从定型位移动到卸胎位。 的自由度进行全约束处理。
结构所承受的载荷情况如下表 1 所示 :
表 1 带束层环体分析所施加的载荷及相关参数
载荷类型 载荷大小
.
-2
重力加速度 /(N m ) 9.8
2.2.2 空载变形分析
为得到瓦块数对夹持环体刚度特性的影响,对夹
持环体静力变形进行分析。分别建立夹持爪数量为 5、
6 和 11 时的模型,分别对其进行分析。
夹持爪数量为 5 时,环体整体变形情况如下图 3
所示。X、Y、Z 方向的变形情况如下图 4 所示。
由整体最大变形量以及 X、Y、Z 方向的变形量可
以看出,夹持环体变形的主要方向为 Z 方向,分析可
图 1 带束层传递环三维模型 以得到产生变形的原因为环体关于 X-Y 平面呈非对称
结构,由于重力的作用而产生的变形。
2.2 空载状态有限元分析
夹持爪数量为 6 时,环体变形情况如图 5 所示。X、
有限元分析模型的建立过程主要包括 :几何简化、
·58· 第 49 卷 第 11 期