
Page 115 - 《橡塑技术与装备》2023年11期
P. 115
测试与分析 杨慧丽 等·基于有限元法的带束层传递环夹持精度分析
Y、Z 方向的变形情况如图 6 所示。
同夹持爪数量为 5 时变形结果类似,夹持爪数为
6 时,变形也主要产生在 Z 方向,由于夹持爪数量增
加会使重力作用产生的非对称分布更加明显,变形量
较夹持爪数量为 5 时更大。
夹持爪数量为 11 时,环体变形情况如下图 7 所示。
X、Y、Z 方向的变形情况如下图 8 所示。与夹持爪数
量为 5、6 时类似,变形主要发生在 Z 轴方向,并且变
形数值也有所增加。
整理上述各项变形结果如表 2 所示。
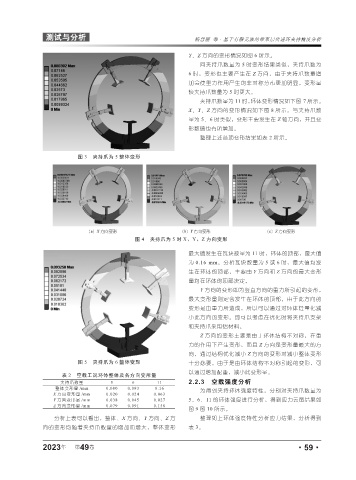
图 3 夹持爪为 5 整体变形
图 4 夹持爪为 5 时 X、Y、Z 方向变形
最大值发生在瓦块数量为 11 时,环体的顶部,最大值
为 0.16 mm。分析瓦块数量为 5 或 6 时,最大值均发
生在环体的顶部,主要由 Y 方向和 Z 方向的最大变形
量均在环体的顶部决定。
Y 方向的变形即为竖直方向的重力所引起的变形,
最大变形量则定会发生在环体的顶部。由于此方向的
变形是由重力所造成,所以可以通过对环体轻量化减
小此方向的变形。即可以考虑在优化时将夹持爪支架
和夹持爪采用铝材料。
Z 方向的变形主要是由于环体结构不对称,在重
力的作用下产生变形,而且 Z 方向是变形量最大的方
向,通过结构优化减小 Z 方向的变形对减小整体变形
图 5 夹持爪为 6 整体变形 十分必要。由于是由环体结构不对称引起的变形,可
以通过增加配重,减小此变形量。
表 2 空载工况环体整体及各方向变形量
夹持爪数量 5 6 11 2.2.3 空载强度分析
整体变形量 /mm 0.080 0.093 0.16
X 方向变形量 /mm 0.020 0.024 0.063 为得到夹持环体强度特性,分别对夹持爪数量为
Y 方向变形量 /mm 0.038 0.045 0.027 5、6、11 的环体强度进行分析,得到应力云图结果如
Z 方向变形量 /mm 0.079 0.091 0.158
图 9 图 10 所示。
分析上表可以看出,整体、X 方向、Y 方向、Z 方 整理如上环体强度特性分析应力结果,分析得到
向的变形均随着夹持爪数量的增加而增大,整体变形 表 3。
年
2023 第 49 卷 ·59·