
Page 120 - 《橡塑技术与装备》2023年6期
P. 120
橡塑技术与装备 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
2
2
轮宽度 :当 Z ≤ 3 时,B ≤ 0.75d w2 ≤ 0.75×25.8 S f1 +sin λ f
h xnf1 ≈f m + ≈fm≈1×0.6=0.6(mm)
≤ 19.35, 4d f1
d. 蜗杆分度圆法向弦齿厚 :
令 B=8(mm),
Sxnf1≈Snf1≈0.864 682 9=0.86(mm)
蜗轮齿冠面角之半 :
B 8 e. 蜗轮分度圆弧齿厚 :
sinr= = = 0.310 438 494 37 π 3.141 6
d w2-0.5m 25.8-0.5×0.6 +0.2tg20°
S f2 =m( +0.2tga+2ζtga)=0.6×( 2
2
查三角函数表得 : r=18°5′ ;
5′54″+2×0.5×tg20°5′54″)=1.205 937 1= 1.21(mm)
(20)蜗杆和蜗轮的测量 :
f. 蜗轮分度圆弧齿厚 :
测量蜗杆和蜗轮,一般是测量其分度圆上的轴向
2
齿厚和法向弦齿厚。 S f2
S xf 2 = d 2 sin δ ≈S f 2 〔1- 〕 =1.205 937 1 ( 1 -
2
a. 蜗杆分度圆轴向齿厚 : 6d 2
πm 3.141 6×0.6 1.205 937 1 2
S af1 = -0.2mlga= -0.2×0.6×tg 6×24 2 )=1.205 416 3=1.21(mm)
2 2
20°5′54″=0.87(mm) g. 蜗轮分度圆法向弦齿厚 :
b. 蜗杆分度圆法向弦齿厚 : S xnf2 =S f2 cosβ f =1.205 416 3×cos5°54′22″=1.20
S nf1 =S af1 C os λ f =0.869 297 4×Cos5°54′22″≈0.86 (mm)
(mm) 经计算变位、非变位蜗杆和蜗轮的几何尺寸与样
c. 蜗杆分度圆法向弦齿高 : 品蜗杆和蜗轮几何尺寸,如对照表 3 所示。
表 3 变位、非变位和样品蜗杆、蜗轮几何尺寸的对照表
参数 法面模 分度圆 啮合中心 变位啮合 变位系 蜗杆特性 节圆 d 导程 T 分度圆法向 分度圆法向
名称 数 m n d f 距 A 0 中心距 A 数 ξ 齿顶高 h w 齿根高 h i 外径 d w 系数 ξ 弦齿厚 S xnf 弦齿高 h xnf
变位 0.597 Ф5.8 15.2 0.5 0.6 0.72 Ф7 9.666 7 Ф5.4 1.885 0.894 0.6
蜗杆
变位 0.597 Ф24 15.2 0.5 0.6 0.42 Ф25.8 Ф24 1.926
蜗轮
非变
位蜗杆 0.597 14.9 0 0.6 0.72 Ф7.3 10.666 7 Ф5.34 1.885 0.894 0.6
非变 0.597 14.9 0 0.6 0.72 Ф22 Ф20 1.926
位蜗轮
样品 Ф6.93
蜗杆
样品 Ф25.8
蜗轮
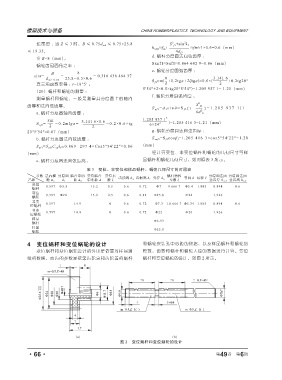
4 变位蜗杆和变位蜗轮的设计 和蜗轮安装孔中心距的数据,以及样品蜗杆和蜗轮的
变位蜗杆和变位蜗轮设计的外形是依靠对样品测 模数,齿数和蜗杆和蜗轮大径的数据进行计算。变位
绘的数据,而齿的参数是依靠齿轮盒和齿轮盖的蜗杆 蜗杆和变位蜗轮的设计,如图 2 所示。
图 2 变位蜗杆和变位蜗轮的设计
6
·66· 第 49 卷 第 期