
Page 118 - 《橡塑技术与装备》2023年6期
P. 118
橡塑技术与装备 CHINA RUBBER/PLASTICS TECHNOLOGY AND EQUIPMENT
值 Φ47.55 mm 的 0.11 mm。加上左、右齿轮与大齿轮
的实际中心距为 27.8 mm,也大于非变位左、右齿轮
和大齿轮中心距 26.96 mm 的 0.84 mm。这也充分地
说明了左、右齿轮及大齿轮,也是采取了变位方法的
结果。
2 蜗杆和蜗轮变位传动啮合种类的选择
为了避免蜗杆和蜗轮的根切,为了提高蜗杆传动
的承载能力,凑配中心距和改善啮合性质及改变降速
比,采用了变位蜗杆和变位蜗轮传动。变位啮合种类
可分为 :径向变位和切向变位两种。切向变位啮合是
将刀具沿刀具中心线方向改变切削位置,所切出的蜗
轮齿廓曲线在切线方向的位置是有所变化,只能使齿
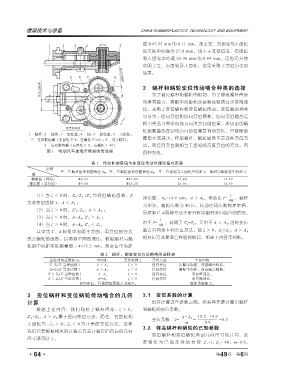
1— 蜗杆 ; 2— 轴承 ; 3— 齿轮盒 ; 4— 轴; 5— 齿轮盖 ; 6— 大齿轮 ;
厚增大或减少,样品蜗杆、蜗轮显然不是这种变位方
7— 左双联齿蜗(左齿轮 Z=8,左蜗轮 Z=40); 8— 沉头螺钉 ;
9— 右双联齿蜗(右齿轮 Z=8,右蜗轮 Z=40) 法。而径向变位就相当于齿轮的高度变位的方法,有
图 1 电动汽车玻璃升降器的传动器 四种方法。
表 1 传动件测量值与非变位传动件理论值对照表
参数
左、右蜗杆齿顶顶圆直径 d W 左、右蜗轮齿顶顶圆直径 d W 左、右齿轮与大齿轮中心距 A 蜗杆与蜗轮轮中心距 A
值
测量值(样品) Φ6.93 Φ25.80 27.80 15.20
理论值(非变位) Φ7.60 Φ25.20 26.96 14.90
(1) 当 ζ < 0 时,Z 2 =Z 2 (Z' 2 为变位蜗轮齿数,Z 1
理论值 : A 0 =14.9 mm,A > A 0 ,传动比 I= ,蜗杆
为非变位齿数 ),A < A 0 ; 40
为单头,蜗轮齿数为 40 齿,传动比和齿数都是定值,
(2)当 ζ > 0 时,Z' 2 =Z 2 ,A > A 0 ;
显然第 C、 d 两种方法不是升降器蜗杆变位啮合的情况。
(3)当 ζ < 0 时,A=A 0 , Z' 2 > Z 2 ; 1
由于 I= ,说明了 Z 2 =Z 2 ,又由于 A > A 0 , 这种变位
(4)当 ζ > 0 时,A=A 0 , Z' 2 < Z 2 。 40
其中第 C、d 种是中心距不变的,用变位的方法 啮合只有第 b 种变位方法,即 ζ > 0,Z 2 =Z 2 ,A > A 0
改变蜗轮的齿数,以得到不同的速比。根据蜗杆与蜗 的变位方法是适合样品的情况,如表 2 内容来判断。
轮的中心距实际测量值 : A=15.2 mm,而变位中心距
表 2 蜗杆、蜗轮变位方法种类的选择表
齿轮对的齿数和 Z Σ 中心距 变位系数 ζ 变位方法 主要目的
Z=Z 2 (Z' 当量齿数 ) A < A 0 ζ < 0 径向变位 凑配中心距,改善啮合性质。
Z=Z 2 (Z' 当量齿数 ) A > A 0 ζ > 0 径向变位 凑配中心距,改善啮合性质。
Z > Z 2 (Z' 当量齿数 ) A=A 0 ζ < 0 径向变位 改变降速比。
Z < Z 2 (Z' 当量齿数 ) A=A 0 ζ > 0 径向变位 改变降速比。
切向变位,只是使齿厚增大或减少。 增加承载能力。
3 变位蜗杆和变位蜗轮传动啮合的几何 3.1 变位系数的计算
计算 但在计算这些参数之前,必须首先要计算出蜗杆
根据上述内容,我们知道了蜗杆传动 : ζ > 0, 和蜗轮的变位系数。
Z' 2 =Z 2 ,A > A 0 属于径向变位方法,而左,右齿轮和 A-A 0 15.2-14.9
变位系数: ζ= = =0.5
大齿轮为 : ζ 1 > 0,ζ 2 < 0 为正角度变位方法。这样 m 0.6
3.2 样品蜗杆和蜗轮的已知参数
我们只要根据相关的计算公式去计算它们各自的几何
变 位蜗 杆 和 变位 蜗 轮传 动 几 何尺 寸 的计 算, 是
尺寸就可以了。
要 将 作 为 已 知 条 件 的 参 数 :Z 1 =1, Z 2 = 40,m=0.6,
6
·64· 第 49 卷 第 期