
Page 113 - 《橡塑技术与装备》2023年5期
P. 113
产品与设计 孙齐·齿轮接触线的变化规律及影响因素
CD 段: L Mmax =2b,S CD =(ε α -1)P b ,ω AB = 2π(ε α -1) 后保持不变 ;图 4(c),齿轮再次进入双齿啮合区,
z
接触线总长度逐渐增大 ;图 4(d),接触线总长度
达到最大值,随后达到图 4(a),齿轮完成一个啮
合周期。
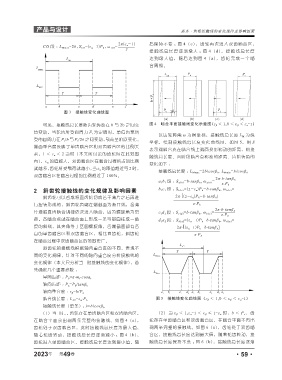
图 3 接触线变化曲线图
可见,接触线总长度随齿轮转动在 b 与 2b 之间交 图 4 啮合平面接触线变化示意图(ε β < 1,0 < ε β < ε α -1)
替变动,当轮齿所受圆周力 F t 为定值时,单位齿宽所
以齿轮转角 ω 为横坐标,接触线总长度 L M 为纵
受的圆周力在 F t /b 与 F t /2b 之间变动,载荷呈阶跃变化。
坐标,绘制接触线总长度变化曲线图,如图 5。用 S
端面重合度反映了单齿啮合区和双齿啮合区的比例关
表示端啮合点在啮合线上端面投影移动的距离,则接
系,1 < ε α < 2 当时(本文所讨论的齿轮均在此范围
触线总长度、各阶段啮合点移动的距离、齿轮转角的
内),ε α 的值越大,双齿啮合区在啮合过程所占的比例
变化如下 :
就越多,齿轮所受载荷就越小,当 ε α 的取值趋近与 2 时,
接触线总长度 : L Mmax =2b/cosβ b , L Mmin =b/cosβ b
双齿啮合区在啮合过程的比例趋近于 100%。
.
a 1 b 1 段: S a1b1 =b tanβ b , ω a1b1 = 2π . b . tanβ b
z.P b
.
2 斜齿轮接触线的变化规律及影响因素 b 1 c 1 段: S b1c1 =(2-ε α )P b -b tanβ b , ω b1c1 =
斜齿轮可以看成将直齿轮切成若干薄片之后再进 2π .[ (2-ε α )P b -b . tanβ b ]
行扭转形成的,斜齿轮齿廓在端截面为渐开线,各薄 z . P b
.
片遵循直齿啮合规律依次进入啮合,因为螺旋角为常 c 1 d 1 段: S c1d1 =b tanβ b , ω b1c1 = 2π . b . tanβ b
z.P b
.
数,各啮合点就在啮合面上形成一条与基圆柱成一角 d 1 a 2 段: S d1a2 =(ε α -1)P b -b tanβ b , ω d1a1 =
度的斜线,其夹角等于基圆螺旋角。各端截面都有各 2π .[ (ε α -1)P b -b . tanβ b ]
自的单齿啮合区和双齿啮合区,相比直齿轮,斜齿轮 z . P b
在啮合过程中双齿啮合区的范围更广。
斜齿轮的接触线根据轴向重合度的不同,表现不
同的变化规律,针对不同的轴向重合度分析接触线的
变化规律(本文只分析当 时接触线的变化规律),首
先确定几个重要参数 :
. .
基圆齿距 : P b =π m t cosa t
轴向齿距 : P z =P b /tanβ b
轴向重合度 : ε β =b/P z
.
啮合线长度 : L AE =ε α P b 图 5 接触线变化曲线图(ε β < 1,0 < ε β < ε α -1)
接触线长度(单条): l=b/cosβ b
(1)当 时,,齿轮存在单齿啮合区和双齿啮合区, (2)当 ε β < 1,ε α -1 < ε β ≤ 1-ε α 时,b < P z ,齿
在 啮合平 面会 出现 两条 完整 的接 触线。 如图 4(a), 轮存在单齿啮合区和双齿啮合区,在啮合平面不再出
齿轮处于双齿啮合区,此时接触线总长度为最大值, 现两条完整的接触线。如图 6(a),齿轮处于双齿啮
随着轮齿转动,接触线总长度逐渐减小 ;图 4(b), 合区,接触线总长度达到最大值,随着轮齿转动,接
齿轮进入单齿啮合区,接触线总长度达到最小值,随 触线总长度保持不变 ;图 6(b),接触线总长度逐渐
年
2023 第 49 卷 ·59·