
Page 71 - 《橡塑技术与装备》2023年12期
P. 71
车用制品技术与应用 徐庶庚 等·工业机器人卡扣装配与超声波焊接集成运用
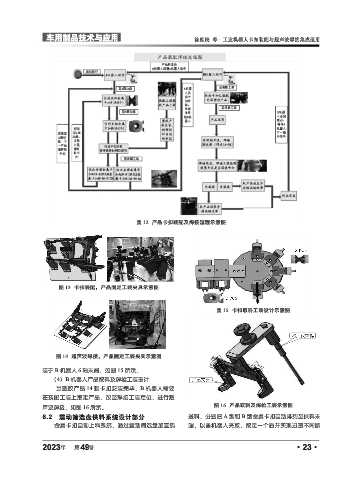
图 12 产品卡扣装配及焊接流程示意图
图 13 卡扣装配,产品固定工装夹具示意图
图 15 卡扣取料工装设计示意图
图 14 超声波焊接,产品固定工装夹具示意图
装于 B 机器人 6 轴末端,如图 15 所示。
(4)B 机器人产品取料及焊枪工装设计
当塑胶产品 14 颗卡扣安装完毕,B 机器人需要
在装配工装上取走产品,放至焊接工装定位,进行超
声波焊接,如图 16 所示。 图 16 产品取料及焊枪工装示意图
6.2 震动筛选盘供料系统设计部分 送料,分别把 A 型和 B 型金属卡扣自动排列至供料末
金属卡扣自动上料系统,通过震动筛选盘加直线 端,以备机器人夹取,取走一个后并实现迅速不间断
2023 第 49 卷 ·23·
年